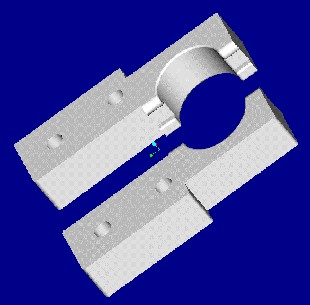
The following figure represents the robot gripper design. The kinematic design for these jaws will be delayed until a robot has been chosen. Holes in the jaws indicate predicted locations for interfacing with a "double wishbone" type kinematic joint. These grippers are intended to interface with two common features on all parts (Common return at the top of the base, common groove on the base). This will allow for known positioning of all pieces independent of their height and "upper" features. The jaws are designed so that they will also provide parallel gripping of the stock cylindrical pieces upon loading of the machines.